Build Cv_bridge With Python3
Cv_bridge last edited 2010-10-13 214759 by RaduBogdanRusu Except where otherwise noted the ROS wiki is licensed under the Creative Commons Attribution 30. And when using the cv_bridge import works fine i did not check the functions.
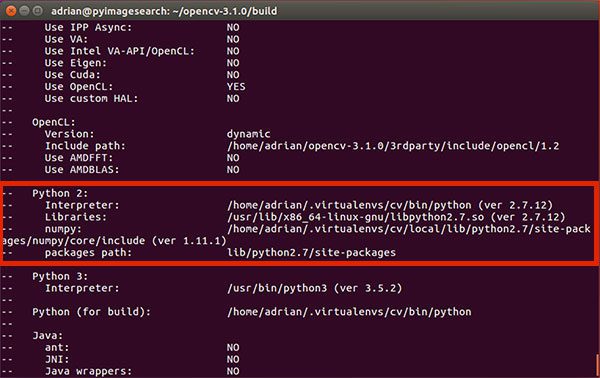
Macos Install Opencv 3 And Python 3 5 Pyimagesearch

Cv_bridge which is part of the ROS perception vision_opencv package must be compiled with Python 3 enabled.
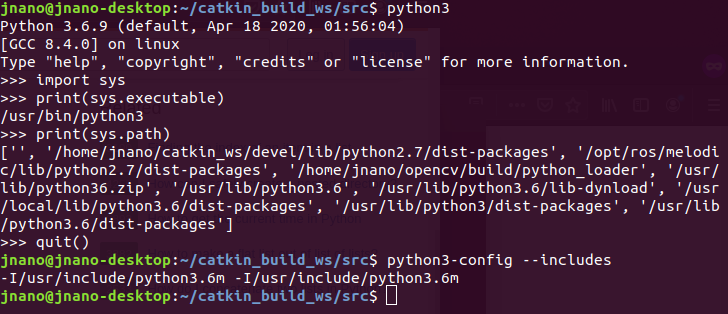
Build cv_bridge with python3. Begin by creating and configuring a catkin workspace pointing to your Anaconda Python 3. Robot Operating System or ROS is the best platform to develop Robotic systems as AI is rapidly progressing it finds many applications in the robots such as computer vision speech recognition.
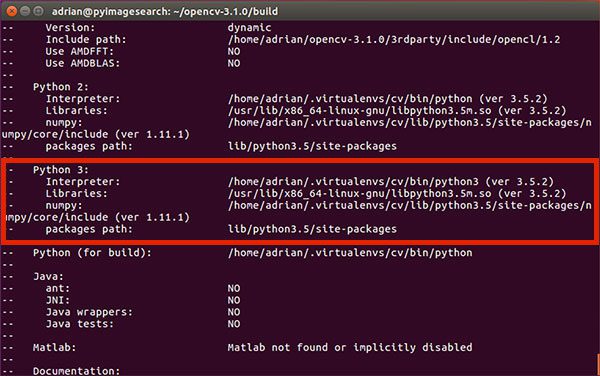
Add python binding for cv_bridgecvtColorForDisplay. To solve it you can try to install. You can do it with passing -DPYTHON_EXECUTABLEusrbinpython3 -DPYTHON_INCLUDE_DIRusrincludepython35m -DPYTHON_LIBRARYusrlibx86_64-linux-gnulibpython35mso args to cmake.
Create a python module for this package. To convert an cvMat into a ROS image message CvBridge provides the following function. Cd dev_ws We need to double check that all the dependencies needed are already installed.
Select the package flavor which you wish to build with ENABLE_CONTRIB and ENABLE_HEADLESS. 1 from cv_bridge import CvBridge 2 bridge CvBridge 3 image_message bridgecv2_to_imgmsgcv_image encodingpassthrough The use of encoding is slightly more complicated in this case. The issue is that cv_bridge is built only for python 27 so our python 3 interpreter is trying to use cv_bridge for 27 and fails lets built it for Python 3.
Currently depth images with 32FC1 is also colorized Fix compilation of cv_bridge with. But as the stackoverflow answer says it compiles using catkin build i am used to use ctkin_make. Return to the root of your workspace.
Colcon build --packages-select cv_basics Run the Nodes. Rosdep install -i --from-path src --rosdistro foxy -y. Since the interpreter is trying to use cv_bridge for 27 will always fails for Python 3.
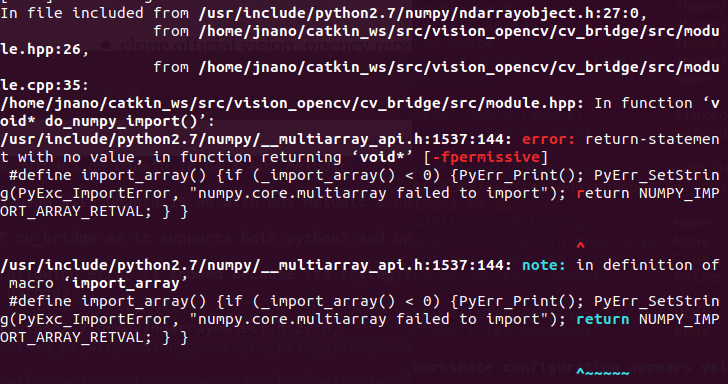
Whenever I use catkin_make I get errors from vision_opencv stemming from the. Python is a good choice for this application due to its ease of rapid prototyping and existing bindings to the OpenCV library. I am trying to use cv_bridge in-order to use opencv on my image topic for ROS.
To run the nodes open a new terminal window. You are right you should build cv_bridge with python3. Lets create a new package named cv_basics.
Ros melodic python3环境解决cv_bridge问题巨坑翻遍所有csdn找了许多方法搞了好久终于解决了现在记录一下博主版本ubuntu1804Ros melodicpython369问题描述代码报错最后两行 from cv_bridgeboostcv_bridge_boost import getCvTypeImportError. I manage to use the answer of tykurtz here using the symlink with the other stackoverflow answer. First lets install some tools well need for the build process.
I am having the same problem. Build the Package. Cd detect_pump mkdir nodes.
Sudo apt-get install python-catkin-tools python3-dev. Cd catkin_wssrc catkin_create_pkg cv_basics image_transport cv_bridge sensor_msgs rospy roscpp std_msgs Create the Image Publisher Node Python Change to the cv_basics package. In most cases using rospy in Python3 works without any major issues only one I got so far is the queue_size parameter for subscribers not working.
Export ENABLE_CONTRIB1 if you wish to build opencv-contrib-python Run pip wheel. Our computer vision system runs with Tensorflow 2 and OpenCV in Python3 with the other packages mainly running with Python2. Open up a terminal window and type these two commands one right after the other.
Make sure you have the latest pip version the pip wheel command replaces the old python setuppy bdist_wheel command which does not support. Im relatively new to ROS let alone LinuxUbuntu so Ive been having trouble getting past this issue for a while. Create the ROS workspace.
Dynamic module does not define module export function PyIni. Mkdir catkin_build_ws and cd catkin_build_ws. Im trying to build my ROS catkin space but Im having trouble building the cv_bridge package getting this error.
This tutorial uses python to build the image-processing pipeline. Cv_bridge also automatically brings in dependencies on the relevant OpenCV modules. Sudo apt-get install python-catkin-tools python3-dev python3-numpy.
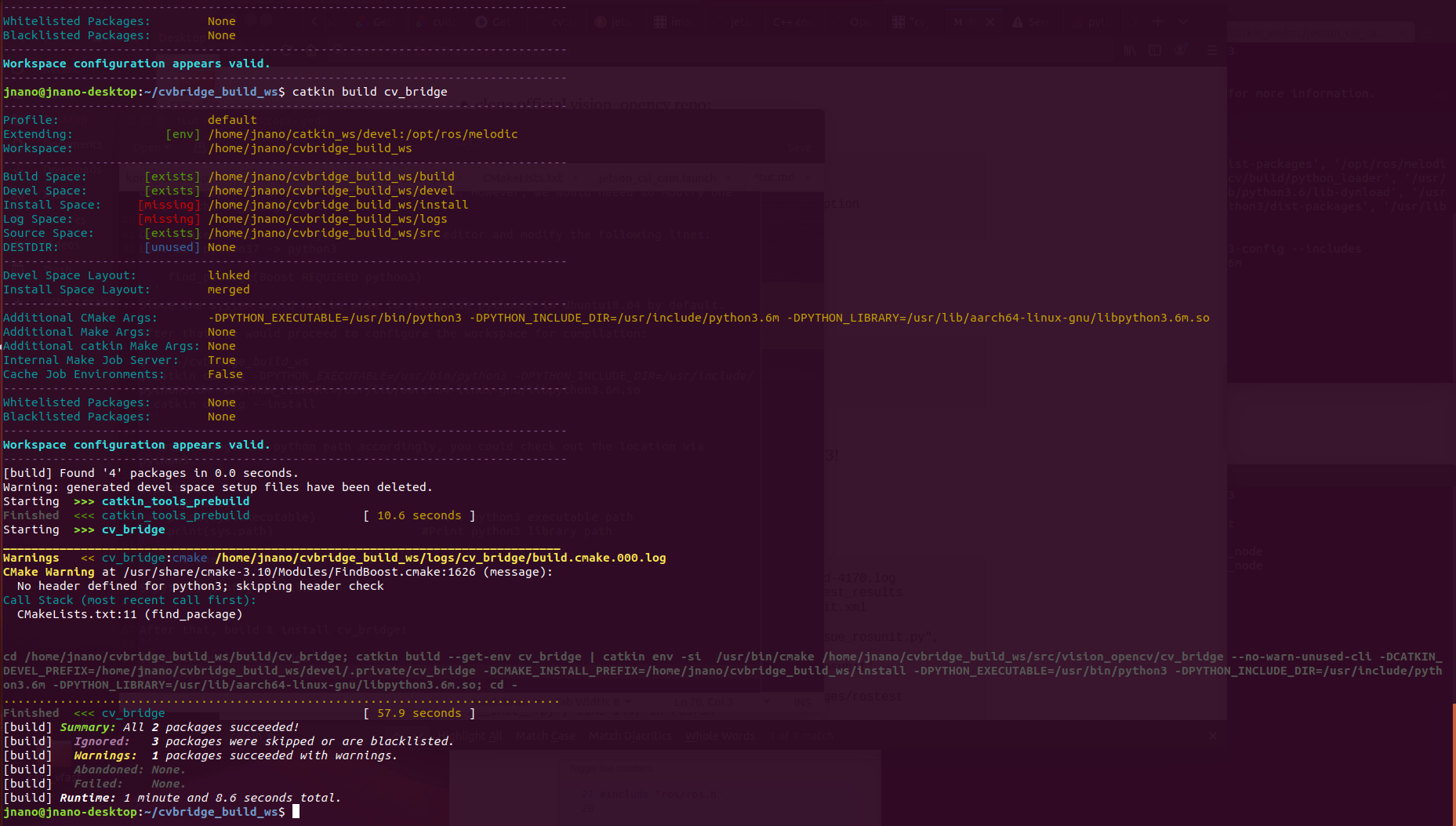
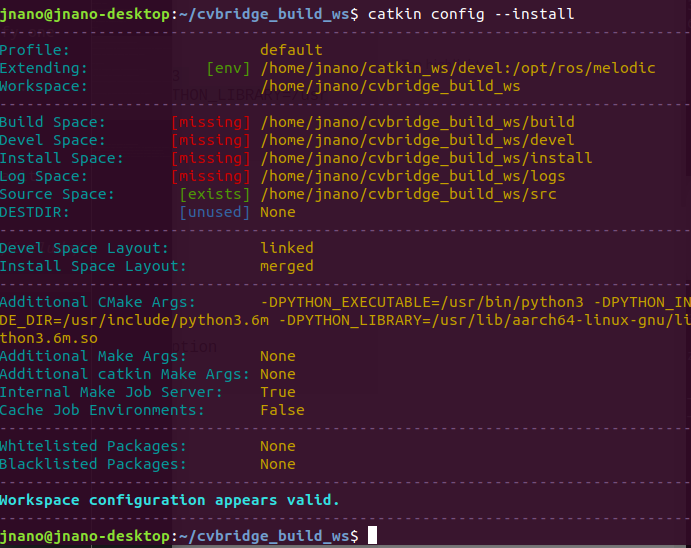
Pythonのincludeパス catkin config --install catkin build cv_bridge source install setupbash -. Mmm probably the issue is that cv_bridge is built only for python 27 and you are using python 3 interpreter that is the default for ROS Melodic. Dont colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized.
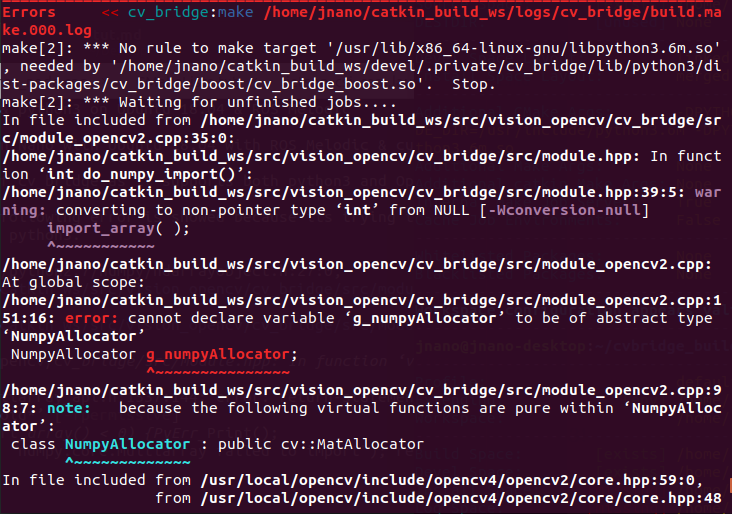
Cyan Infinite Compiling Ros Cv Bridge With Python 3
Cv Bridge With Python3 Problem Jetson Nano Nvidia Developer Forums

Installing Opencv 3 0 For Both Python 2 7 And Python 3 On Your Raspberry Pi 2 Pyimagesearch
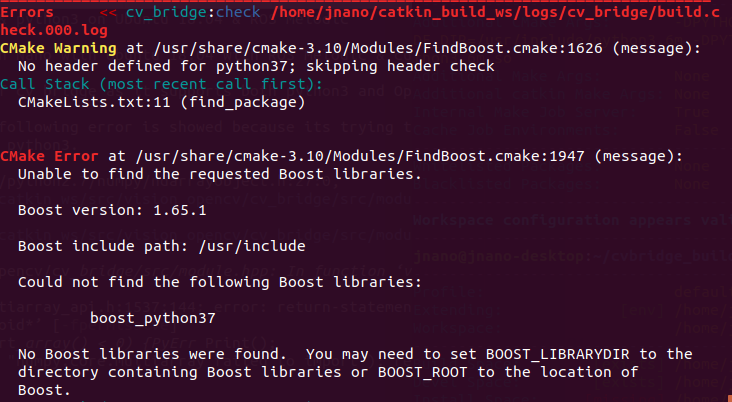
Problem With The Cmake Issue Involving Cv Bridge Issue 329 Ros Perception Vision Opencv Github
Cyan Infinite Compiling Ros Cv Bridge With Python 3
Cyan Infinite Compiling Ros Cv Bridge With Python 3
Qt Error On Cv2 Imshow Specific To Version 4 2 0 32 Issue 290 Opencv Opencv Python Github
Noetic And Python 3 Plan Issue 303 Ros Perception Vision Opencv Github
Cyan Infinite Compiling Ros Cv Bridge With Python 3
Ubuntu 16 04 How To Install Opencv Pyimagesearch
Cyan Infinite Compiling Ros Cv Bridge With Python 3
Unable To Import Cv2 And Cvbridge In Python3 Issue 196 Ros Perception Vision Opencv Github
Cyan Infinite Compiling Ros Cv Bridge With Python 3
Ubuntu 16 04 How To Install Opencv Pyimagesearch
Problem With The Cmake Issue Involving Cv Bridge Issue 329 Ros Perception Vision Opencv Github

Macos Install Opencv 3 And Python 3 5 Pyimagesearch

Macos Install Opencv 3 And Python 3 5 Pyimagesearch
Ros2 Build Warning And Test Failure Of Conversion Py After Manual Installation Of Python3 Numpy And Python3 Opencv Issue 221 Ros Perception Vision Opencv Github
Cyan Infinite Compiling Ros Cv Bridge With Python 3




{kind=link}
Post a Comment for "Build Cv_bridge With Python3"